Deep Flow Guided Image Based Visual Servoing
Abstract
Existing deep learning based visual servoing approaches regress the relative camera pose between a pair of images circumventing the requirement for scene’s depth and camera parameters. However, estimation of accurate camera pose on diverse scenes is a non-trivial problem, thus existing deep learning based approaches require a huge amount of training data and sometimes fine-tuning for adaptation to a novel scene. Furthermore, current approaches do not consider underlying geometry of the scene and rely on direct estimation of camera pose. Thus, inaccuracies in prediction of the camera pose especially for distant goals leads to a degradation in the servoing performance. In this paper, we propose a two-fold solution: (i) we consider optical flow as our visual features, which are predicted using a deep neural network. The flow features provide dense correspondences between an image pair that leads to a precise convergence of the servoing approach. (ii) We then integrate these flow features with depth estimate provided by another neural network using interaction matrix similar to classical image based visual servoing. This geometrical understanding provided by the depth integration increases the robustness of the overall system. We present two paradigms for depth estimation under single-view and two-view settings. Through 10 unseen photo-realistic simulation environments and a real scenario on an aerial robot, we show that our approach generalises to novel scenarios producing precise and robust servoing performance for 6 degrees of freedom positioning task over diverse environments with even large camera transformations without any requirement for retraining or fine-tuning.
Pipeline of the Proposed approach

Video Explanation
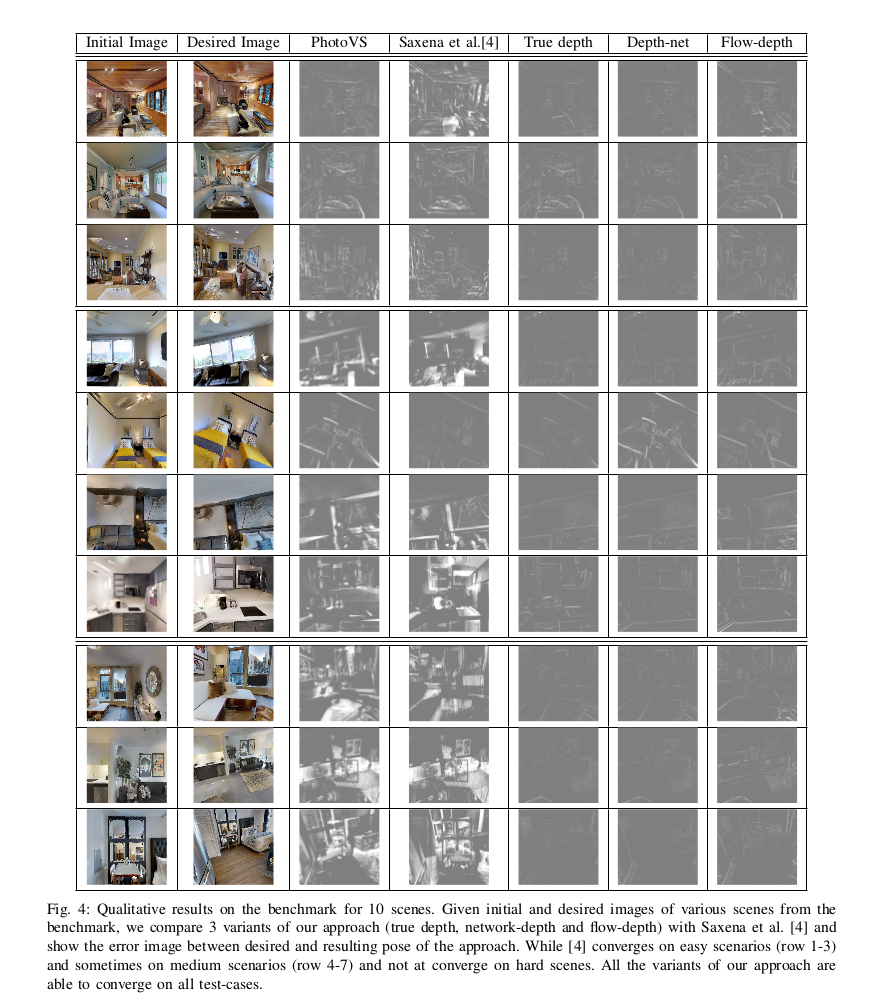
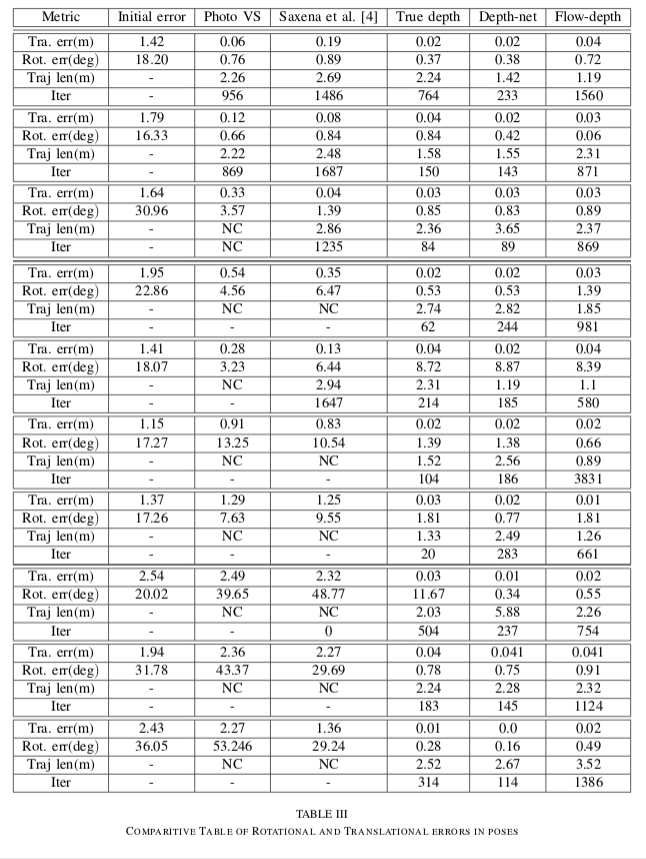
Predictions and Results